Projects
I am part of Mobile Robotics Lab since 2014.
Some projects: (click in the image to play the video)
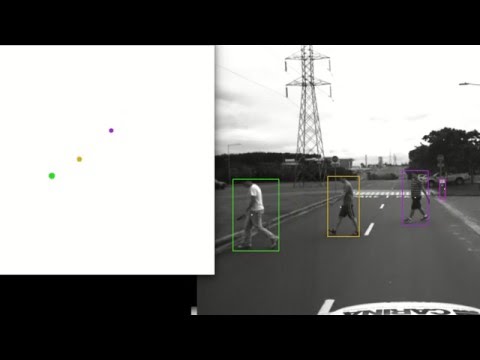
Trajectory Forecasting

Obstacle Detection

Obstacle Detection and distance estimation
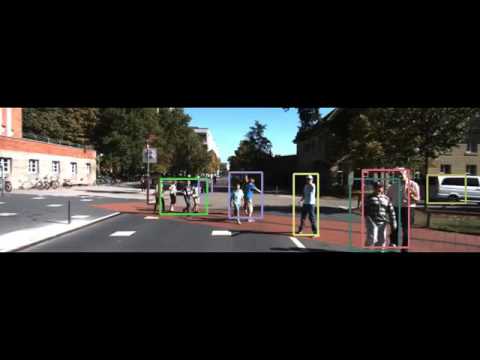
Tracking
My published work:
RIDEL, DANIELA A..; DEO, NACHIKET.; WOLF, DENIS.; and TRIVEDI, MOHAN. Scene Compliant Trajectory Forecast with Agent-Centric Spatio-Temporal Grids. IEEE Robotics and Automation Letters (RA-L/ICRA), Volume: 5 , Issue: 2 , April 2020.
RIDEL, DANIELA A..; DEO, NACHIKET.; WOLF, DENIS.; and TRIVEDI, MOHAN. Understanding Pedestrian-Vehicle Interactions with Vehicle Mounted Vision: An LSTM Model and Empirical Analysis, In: IEEE Intelligent Vehicles Symposium (IV), Paris/France, 2019.
RIDEL, DANIELA A..; REHDER, EIKE.; LAUER, MARTIN.; STILLER, CHRISTOPH.; and WOLF, DENIS. A Literature Review on the Prediction of Pedestrian Behavior in Urban Scenarios, In: IEEE International Conference on Intelligent Transportation System (ITSC), Maui/Hawaii, 2018.
RIDEL, DANIELA A..; SHINZATO, PATRICK Y.; PEREIRA, ANA R.; GRASSI, VALDIR.; and WOLF, DENIS F. . Obstacle avoidance using stereo-based generic obstacle tracking, In: 2017 Latin American Robotics Symposium (LARS) and 2017 Brazilian Symposium on Robotics (SBR), Curitiba/Brazil, 2017, pp. 1-6.
SHINZATO, PATRICK Y. ; DOS SANTOS, TIAGO C. ; ROSERO, LUIS ALBERTO ; RIDEL, DANIELA A.; MASSERA, CARLOS M. ; ALENCAR, FRANCISCO ; BATISTA, MARCOS PAULO ; HATA, ALBERTO Y. ; OSORIO, FERNANDO S. ; WOLF, DENIS F. . CaRINA dataset: An emerging-country urban scenario benchmark for road detection systems. In: 19th IEEE ITSC International Conference on Intelligent Transportation Systems, 2016, Rio de Janeiro/Brazil. p. 41.
ALENCAR, FRANCISCO A.R. ; FILHO, CARLOS MASSERA ; RIDEL, DANIELA A.; WOLF, DENIS F. . Fast Metric Multi-Object Vehicle Tracking for Dynamical Environment Comprehension. In: 12th Latin American Robotics Symposium (LARS) and 3rd Brazilian Symposium on Robotics (LARSSBR), 2015, Uberlândia/Brazil. p. 175-180.
RIDEL, DANIELA A.; SHINZATO, PATRICK Y. ; WOLF, DENIS F. . A Clustering-Based Obstacle Segmentation Approach for Urban Environments. In: 12th Latin American Robotics Symposium (LARS) and 3rd Brazilian Symposium on Robotics (LARSSBR), 2015, Uberlândia/Brazil. p. 265-270.
RIDEL, D. A.; SHINZATO, P. Y. ; WOLF, D. F. . Obstacle segmentation with low-density disparity maps. In: 7th PPNIV/IROS Workshop on Planning, Perception and Navigation for Intelligent Vehicles, International Conference on Intelligent Robots and Systems, 2015, Hamburg/Germany.